Projects
Senior Software Engineer, Agile Robots 2022-08-19
Senior Developer, Project Lead, Technical Lead @ Agile Robots AG.
Robotics Perception Application C++ / Python
Read More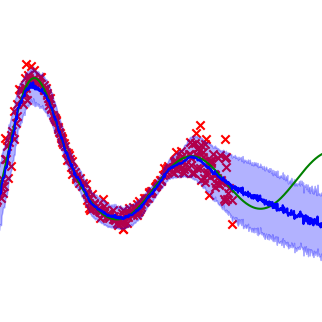
Heteroscedastic Dropout Neural Network 2019-04-12
Implementation of a neural network which outputs an estimate of its predictive uncertainty while learning a heteroscedastic model of the target/observation noise.
Python Research Uncertainty Quantification PyTorch
Read More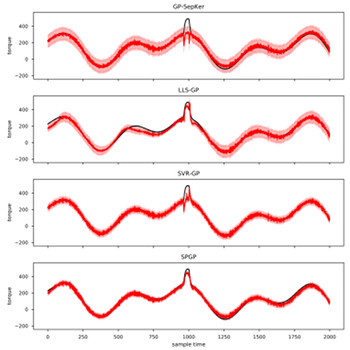
Semi-Parametric Learning with Bayesian NNs and GPs 2019-03-01
Implementation and evaluation of different semi-parametric machine learning approaches.
Python C++ Research Machine Learning Tensorflow
Read More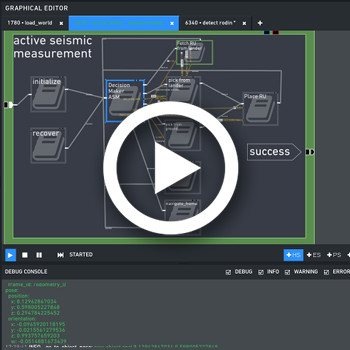
RAFCON: Modeling, Logging and Analysing Robotic Task Execution 2019-03-01
Extension of RAFCON with capabilities to label and log its control and data flow in order to analyse robotic task execution.
Python Application Infrastructure
Read More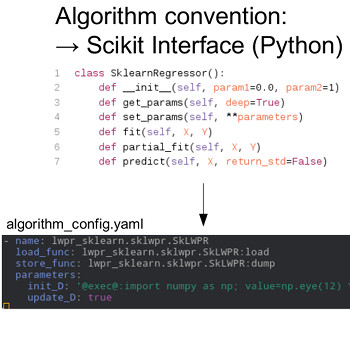
Regression Testbed for Reproducible Research 2018-10-01
Development of an evaluation framework for machine learning algorithms for better experiment reproducability, solving e.g. data and model lineage issues.
Python Research Machine Learning Infrastructure
Read More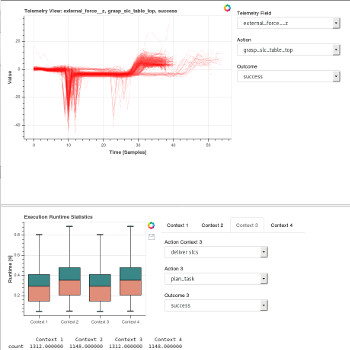
LogView - Interactive Visualization of Robotic Log Data 2018-06-18
A viewer application I developed for integrated analysis of logged task-execution data with logged sensor data for our mobile manipulation platform.
Python Robotics Data Management PyData Visualization
Read More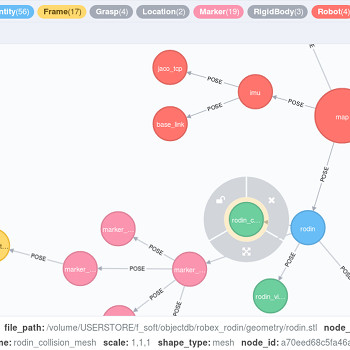
Robotic World Model using a Graph Database Backend 2017-10-01
Development of a scene-graph based robotic world model component used for storing and querying information about task-relevant objects in the robot's environment.
Python Application Infrastructure ROS
Read More
SpaceBot Camp - Autonomous Sample-Return Mission 2015-11-01
Participation at SpaceBot Camp, a robotic challenge where our rover autonomously explored, searched and returned objects in unknown, unstructered terrain.
Python Application Infrastructure
Read More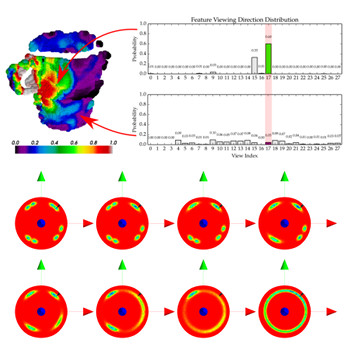
Bayesian Orientation Estimation and Local Surface Informativeness for Active Object Pose Estimation 2015-04-01
Development and evaluation of a point-cloud-feature based approach to recursive (multi-view), probabilistic 3d orientation estimation of objects using Bingham mixture models.
C++ Python Research Point-Cloud Processing Machine Learning
Read More
RoboCup Logistics League - Autonomous Robotic Warehouse Logistics 2014-07-01
Participation (two-time winner, one 2nd place) at RoboCup Logistics League in 2011-2014, for which we developed a system of three collaborating robots solving material logistics in a warehouse scenario.
C++ System Architecture Trajectory Control Infrastructure
Read More
Adjutant - A framework for Flexible Human-Machine Collaborative Systems 2013-07-01
Adjutant is a software framework in ROS which models human-robot collaborative systems via relating sets of robot capabilities to specific user interfaces or interaction paradigms.
Python Robotics Point-Cloud Processing ROS
Read More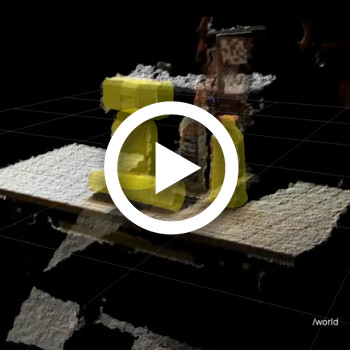
Physically Plausible Scene Parsing using a Physics Engine and MCMC 2013-04-01
Development of a sequential scene parsing approach combining candidate detections of object detectors with a physics engine in order to assess the physical plausibility of detections.
C++ Research Point-Cloud Processing
Read More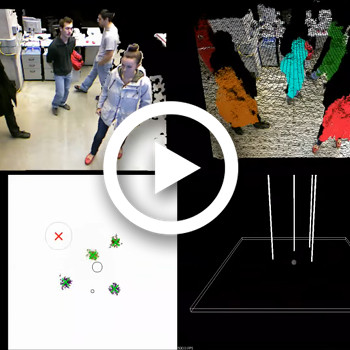
Multi-Target Tracking-by-Detection based People Tracking 2012-11-01
Development of a particle filter for tracking a variable number of people using an RGB-D camera.
C++ Application Particle Filter
Read More
Numerically Robust Implementation of an Extended Kalman Filter 2011-08-01
Implementation and evaluation of an extended Kalman filter using a numerically robust UD-factorization and computation in its update and prediction step.
C++ Research
Read More