RoboCup Logistics League - Autonomous Robotic Warehouse Logistics
Overview
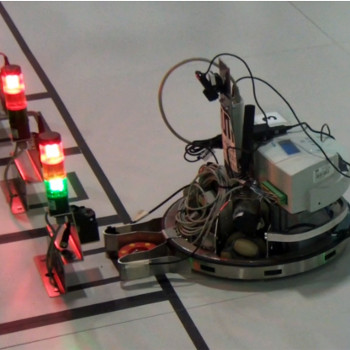
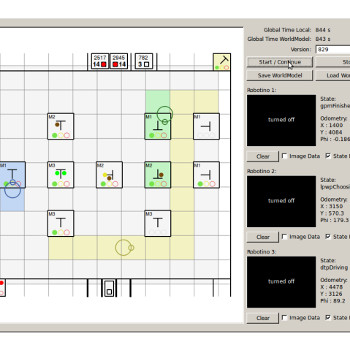
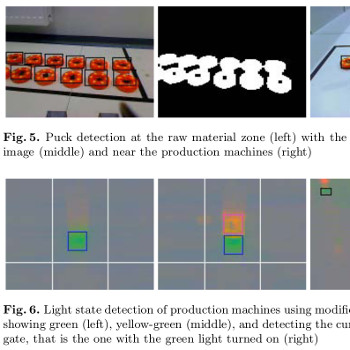
The RoboCup Logistics League offers a competition within a simulated industrial environment. In order to solve the logistical tasks, all three robots not only have to operate autonomously in a flexible, effective and robust way on their own, they should also collaborate efficiently in order to maximize the overall outcome. To this end, we implemented a custom-made solution (no ROS) based on the Festo Robotino platform involving robot hardware modifications and a holistic software system architecture solving task planning and execution, multi-robot collaboration, visual perception, motion planning and execution, and visualization/monitoring tools for game and robot states.
More details can be found in the publication linked below.
Responsibilities
- overall system and control architecture (with core team members)
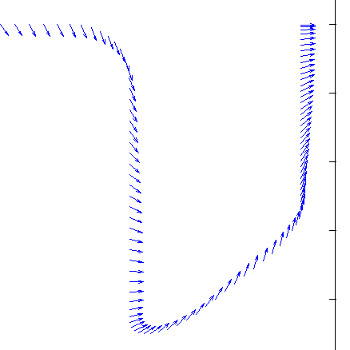
- Linear-Segments-Parabolic-Blends (LSPB) trajectory generation
- PD trajectory control and shared-memory communication to actuator control deamon
- context-dependend camera configuration over Video4Linux-interface
Further Material
- [1] Homepage: Bavarian Bending Units
- [2] Jentzsch, Sören, Sebastian Riedel, Sebastian Denz, and Sebastian Brunner. “TUMsBendingUnits from TU Munich: RoboCup 2012 logistics league champion.” In Robot Soccer World Cup, pp. 48-58. Springer, Berlin, Heidelberg, 2012.
Technology Stack: C++, Boost, Eigen, Video4Linux
Work Affiliation: Technical University Munich (TUM), in collaboration with Sören Jentzsch, Peter Gschirr, Sebastian Brunner, Stefan Profanter, Sebastian Denz, Christian Ihrke, Sebastian Fischer and Ingmar Kessler