Robotic World Model using a Graph Database Backend
Highlights
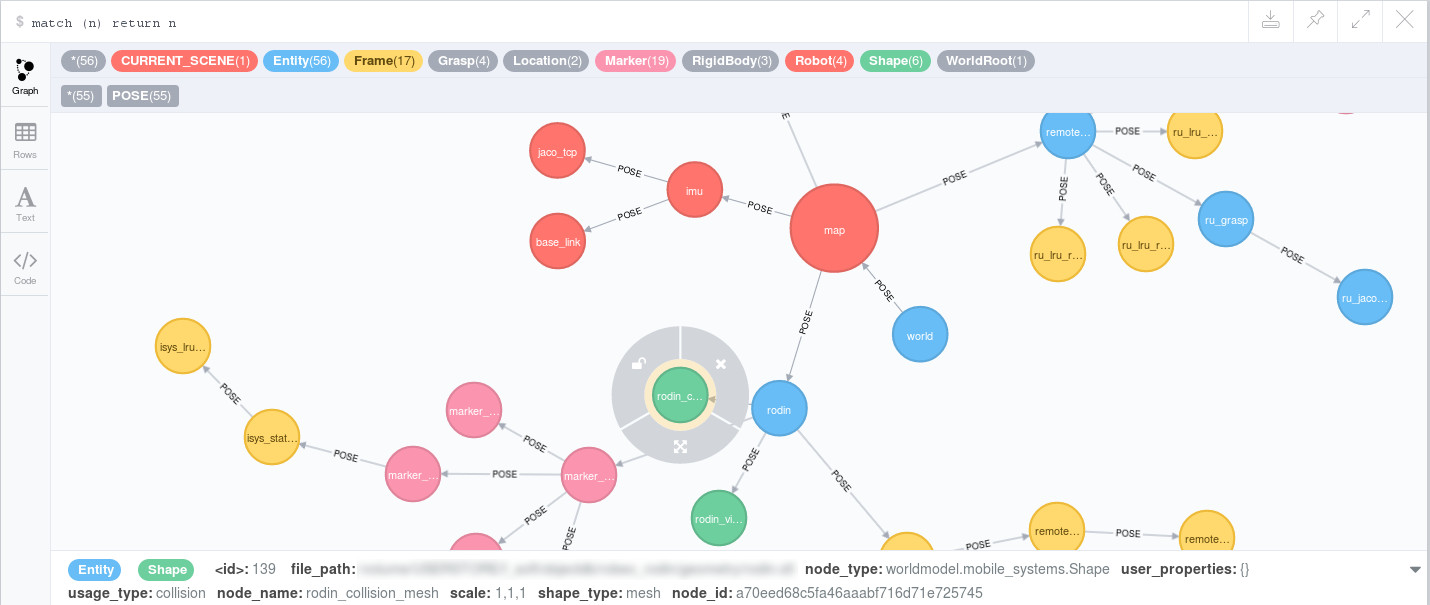
- database backend based on Neo4J
- entity schema and object-graph mapping (OGM) from stored entities in the database to Python class instances
- pre-defined world model operations (e.g. add/remove objects, query relative transformation between arbitrary objects, load/dump graph from/to yaml files, …)
- pre-defined utility queries (e.g. object triples with certain properties) along-side full flexibility of CYPHER (Neo4j’s graph query language)
- interfaces to ROS
Further Material
- [1] Lehner, Peter, Sebastian Brunner, Andreas Dömel, Heinrich Gmeiner, Sebastian Riedel, Bernhard Vodermayer, and Armin Wedler. “Mobile manipulation for planetary exploration.” In 2018 IEEE Aerospace Conference, pp. 1-11. IEEE, 2018.
Technology Stack: Python, Neo4J, neomodel, ROS
Work Affiliation: German Aerospace Center (DLR), in collaboration with Andreas Dömel, Sebastian Brunner, Peter Lehner